
-
- Downloads
DOC: Release notes updated in docs, execution pipeline diagram updated
Showing
- Docs/source/SimManager_Modules.rst 6 additions, 3 deletionsDocs/source/SimManager_Modules.rst
- Docs/source/media/Render.jpg 0 additions, 0 deletionsDocs/source/media/Render.jpg
- Docs/source/media/pipeline.png 0 additions, 0 deletionsDocs/source/media/pipeline.png
- Docs/source/releases.rst 235 additions, 0 deletionsDocs/source/releases.rst
Docs/source/media/Render.jpg
deleted
100644 → 0
{kind=link}
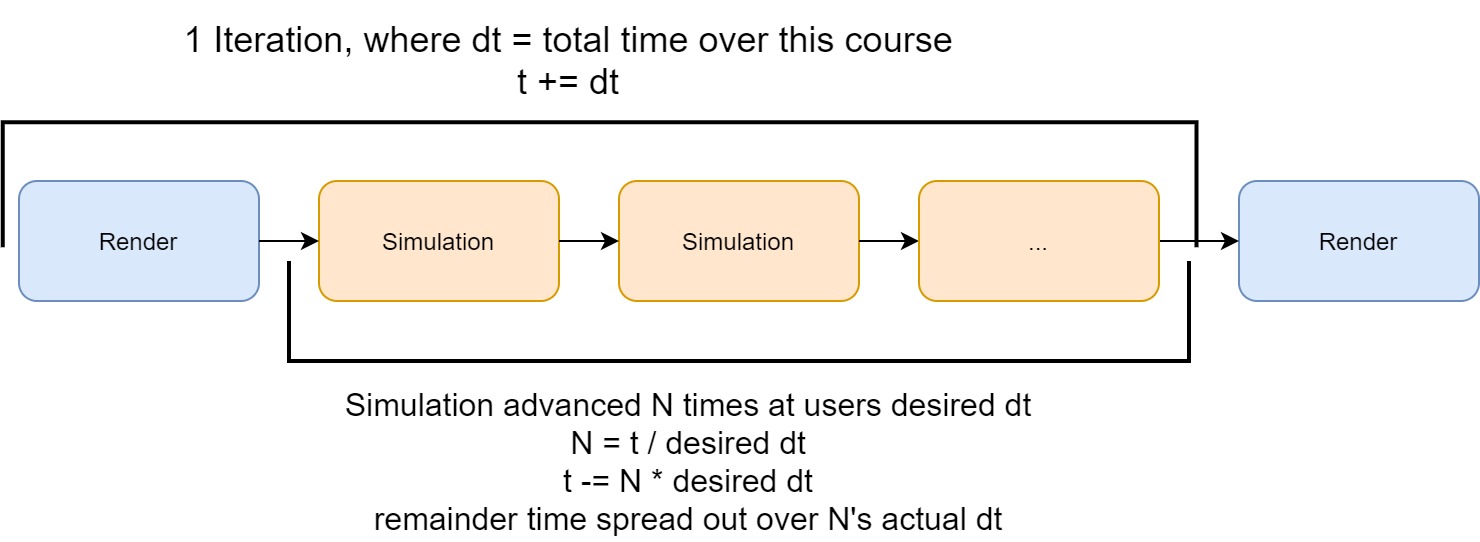
69.8 KiB
Docs/source/media/pipeline.png
0 → 100644
{kind=link}
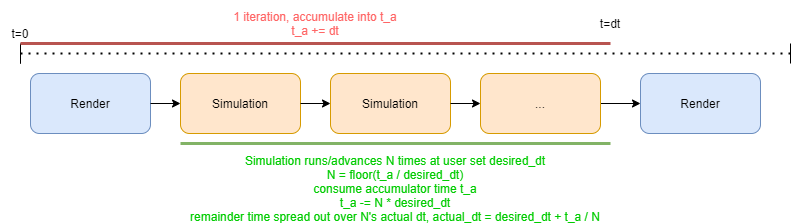
19.6 KiB