
-
- Downloads
documentation update, sphere fix, primitive vs primitive rbd example
Showing
- Docs/source/Collision_Detection.rst 160 additions, 18 deletionsDocs/source/Collision_Detection.rst
- Docs/source/Event_System.rst 1 addition, 1 deletionDocs/source/Event_System.rst
- Docs/source/media/Collision_Detection/capsuleToPoint.png 0 additions, 0 deletionsDocs/source/media/Collision_Detection/capsuleToPoint.png
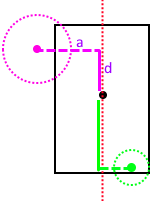
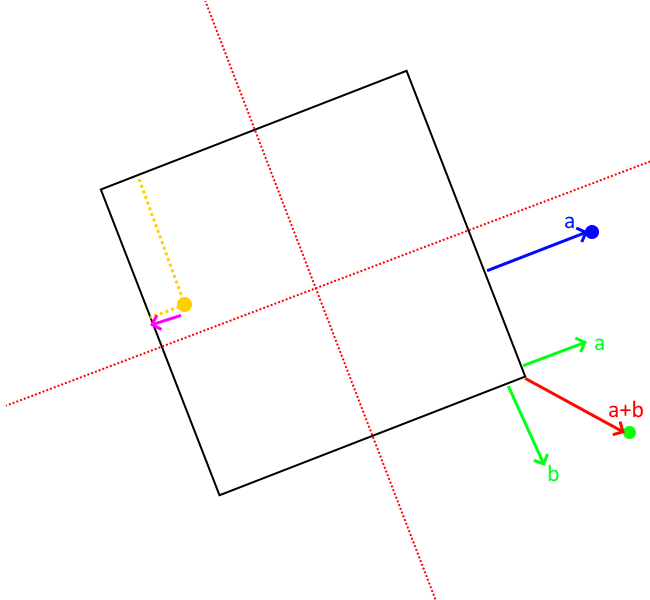
- Docs/source/media/Collision_Detection/constraintEx1.png 0 additions, 0 deletionsDocs/source/media/Collision_Detection/constraintEx1.png
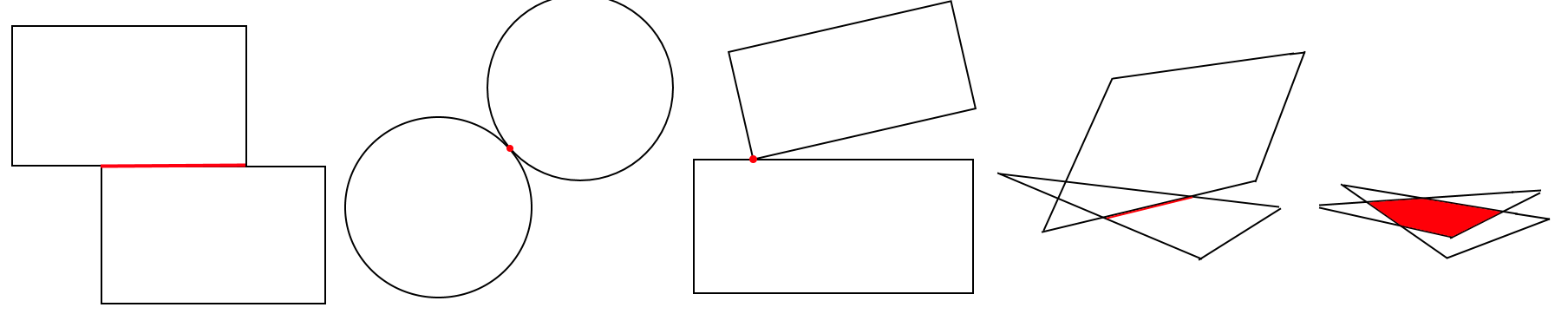
- Docs/source/media/Collision_Detection/contactManifolds.png 0 additions, 0 deletionsDocs/source/media/Collision_Detection/contactManifolds.png
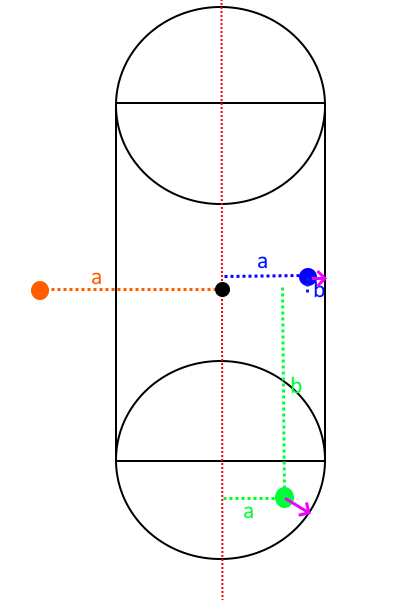
- Docs/source/media/Collision_Detection/cylinderToPoint.png 0 additions, 0 deletionsDocs/source/media/Collision_Detection/cylinderToPoint.png
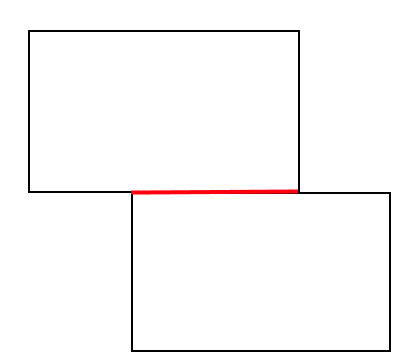
- Docs/source/media/Collision_Detection/edgeContact.png 0 additions, 0 deletionsDocs/source/media/Collision_Detection/edgeContact.png
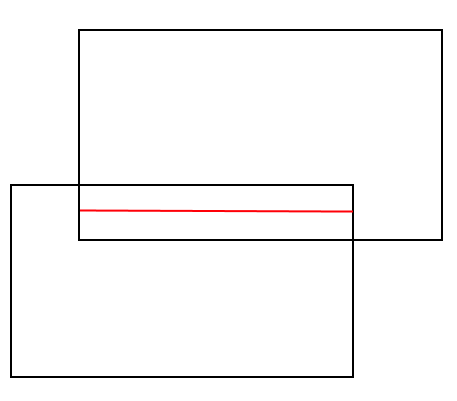
- Docs/source/media/Collision_Detection/edgeContactOverlap.png 0 additions, 0 deletionsDocs/source/media/Collision_Detection/edgeContactOverlap.png
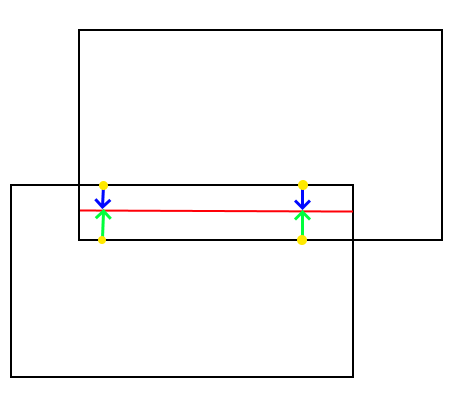
- Docs/source/media/Collision_Detection/edgeContactResolve.png 0 additions, 0 deletionsDocs/source/media/Collision_Detection/edgeContactResolve.png
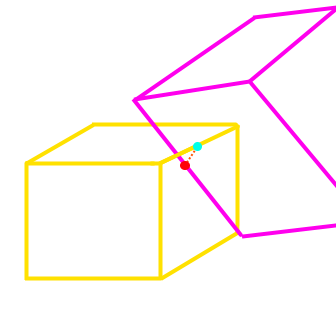
- Docs/source/media/Collision_Detection/edgeToEdge.png 0 additions, 0 deletionsDocs/source/media/Collision_Detection/edgeToEdge.png
- Docs/source/media/Collision_Detection/obbToPoint.png 0 additions, 0 deletionsDocs/source/media/Collision_Detection/obbToPoint.png
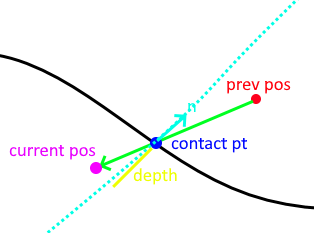
- Docs/source/media/Collision_Detection/pointCCD.png 0 additions, 0 deletionsDocs/source/media/Collision_Detection/pointCCD.png
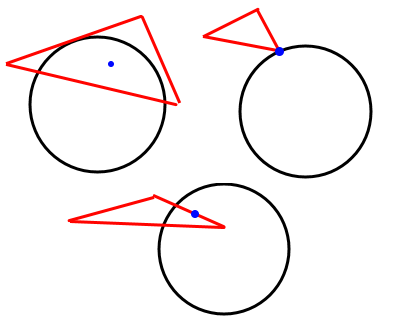
- Docs/source/media/Collision_Detection/pointInPolygon.png 0 additions, 0 deletionsDocs/source/media/Collision_Detection/pointInPolygon.png
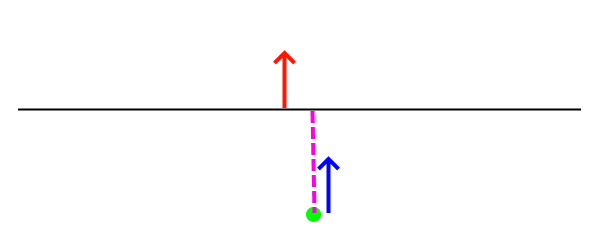
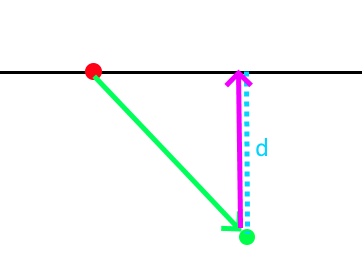
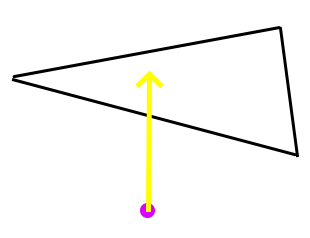
- Docs/source/media/Collision_Detection/pointPlaneProj.png 0 additions, 0 deletionsDocs/source/media/Collision_Detection/pointPlaneProj.png
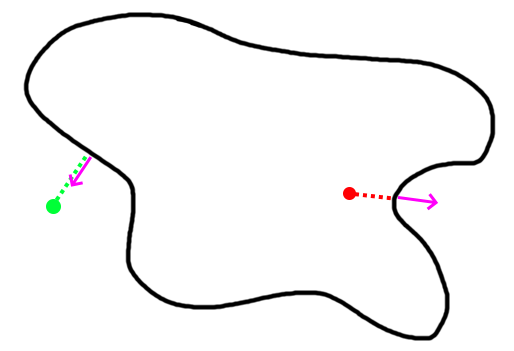
- Docs/source/media/Collision_Detection/pointToImplicit.png 0 additions, 0 deletionsDocs/source/media/Collision_Detection/pointToImplicit.png
- Docs/source/media/Collision_Detection/pointToSphere.png 0 additions, 0 deletionsDocs/source/media/Collision_Detection/pointToSphere.png
- Docs/source/media/Collision_Detection/psuedonormalProblem.png 0 additions, 0 deletions.../source/media/Collision_Detection/psuedonormalProblem.png
- Docs/source/media/Collision_Detection/sphereToPlane.png 0 additions, 0 deletionsDocs/source/media/Collision_Detection/sphereToPlane.png
- Docs/source/media/Collision_Detection/sphereToTriangle.png 0 additions, 0 deletionsDocs/source/media/Collision_Detection/sphereToTriangle.png
- Docs/source/media/Collision_Detection/vertexTriangle.png 0 additions, 0 deletionsDocs/source/media/Collision_Detection/vertexTriangle.png
{kind=link}
16.1 KiB
{kind=link}
1.91 KiB
{kind=link}
33.6 KiB
{kind=link}
4.78 KiB
{kind=link}
1.53 KiB
{kind=link}
1.74 KiB
{kind=link}
3.59 KiB
{kind=link}
9.93 KiB
{kind=link}
27.3 KiB
{kind=link}
11.6 KiB
{kind=link}
17.7 KiB
{kind=link}
5.08 KiB
{kind=link}
15 KiB
{kind=link}
13.4 KiB
{kind=link}
4.98 KiB
{kind=link}
7.46 KiB
{kind=link}
13.5 KiB
{kind=link}
4.75 KiB